Con un sensor ultrasonido podemos calcular la distancia al objeto más cercano frente a él. Es un componente muy útil para construir:
- Robots para competiciones de sumo
- Robots capaces de salir de laberintos
- Robots que esquiven obstáculos

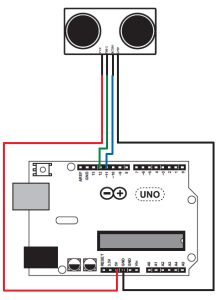
El sensor ultrasonido tiene 4 pines
- VCC se conecta al pin 5V de Arduino
- GND se conecta al pin GND de Arduino
- TRIG se conecta a un pin digital de Arduino (por ejemplo pin 12)
- ECHO se conecta a un pin PWM de Arduino (por ejemplo pin 11)
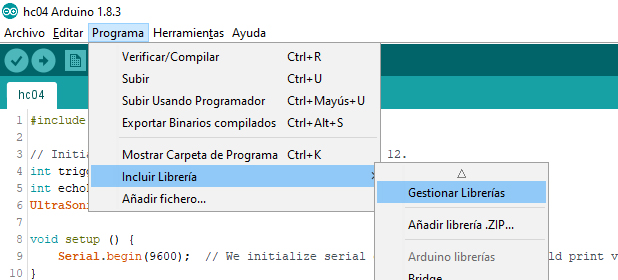
Una vez realizadas las conexiones pasamos a la programación. Para facilitar la programación contamos con varias librerías. En este ejemplo vamos a utilizar la librería HCSR04 de Martín Sosic. Pulsamos en el menú «Programa» y seleccionamos «Incluir librería» y después «Gestionar librerías«.
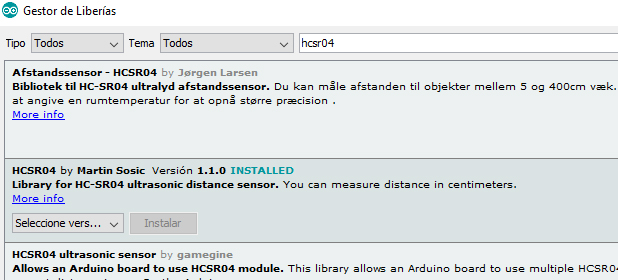
Se abre una ventana con el listado de librerías que podemos instalar. En el buscador escribimos HCSR04 y pulsamos en instalar la librería de Martin Sosic
A continuación creamos el siguiente programa, donde medimos la distancia al objeto más próximo y mostramos el dato en centímetros por el monitor serie de Arduino IDE
#include <HCSR04.h>
int triggerPin = 13;
int echoPin = 12;
UltraSonicDistanceSensor distanceSensor(triggerPin, echoPin);
void setup () {
Serial.begin(9600);
}
void loop () {
double distance = distanceSensor.measureDistanceCm();
Serial.println(distance);
delay(500);
}